
两轮平衡小车制作过程(持续更新~~)
第一步:确定小车硬件
第二步:搭建小车硬件
小插曲:航模表演的图片
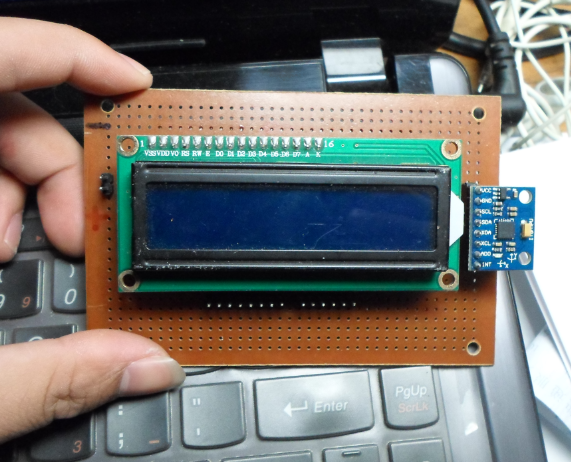
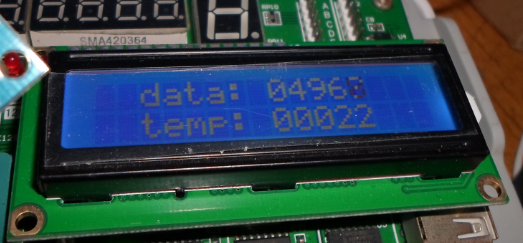
第三步:准确读取MPU6050数据
下面这一段可以忽略~~
大家好,早一段时间看朋友买了台独轮车(可以站人的那种)觉得这个东西很新奇,在网上百度了一下,发现这个东西不好做,不过两轮的平衡小车好像相对会容易些,而且两种车的基本原理差不多。
在网上看了一些关于两轮平衡小车的资料,资料还算比较多,又在淘宝上搜了一下需要的元器件,元器件的价格也不贵,所以最近准备做一台两轮的平衡小车(我这个是很小的那种,不是用来载人的)。
当然,还有一个最重要因素是,我一直想做一块飞控(有人可能没有听过,简单的说他就是无人机的大脑),开始很天真,现在知道这个很难很难(具体的难题包括:硬件电路的设计,和软件算法的设计,特别是软件算法,四元数,欧拉角,互补滤波,卡尔曼滤波,IIR滤波,捷联惯导,MPU6050 DMP,FreeRTOS等等~~~看那些公式就头大了~~~硬件设计要设计的很小,又要很稳定,所以要考虑的东西也不少~~还有那些英文资料也挺头疼的~~~),所以把他当做自己的一个梦想去慢慢完成,平衡小车正好要用到MPU6050还要用到互补滤波或者是卡尔曼滤波,还有PID的参数整定等等~~~都和我要做的飞控有共同之处~~这样离梦想又可以进一步了~~~~
我可能是做一点东西就发一点东西(我也不知道可不可以做出来,不过我会尽力而为~~),但是进度可能会比较慢(因为每天要上课,还有要学习STM32,玩航模等等),如果我说的不对的或者错误的地方还望各位高手指正,我一定及时修正错误。
~~~我还只是个小白,所以欢迎各位大侠拍砖~~~
下面是重点部分~~~
1 确定小车硬件(包括电机,电机驱动板,主控,传感器等等)
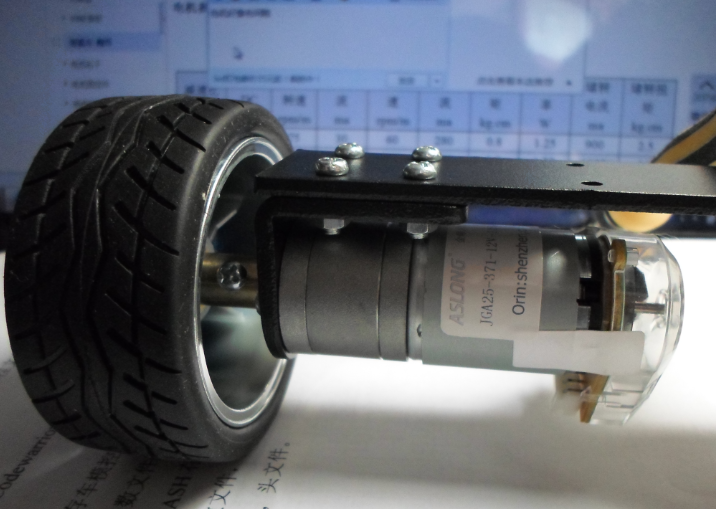
第一部分,小车的用来走路的小脚~~~
1> 电机:带减速齿轮和码盘的大功率,大扭矩的电机两个(直接在淘宝上搜索平衡小车就有)


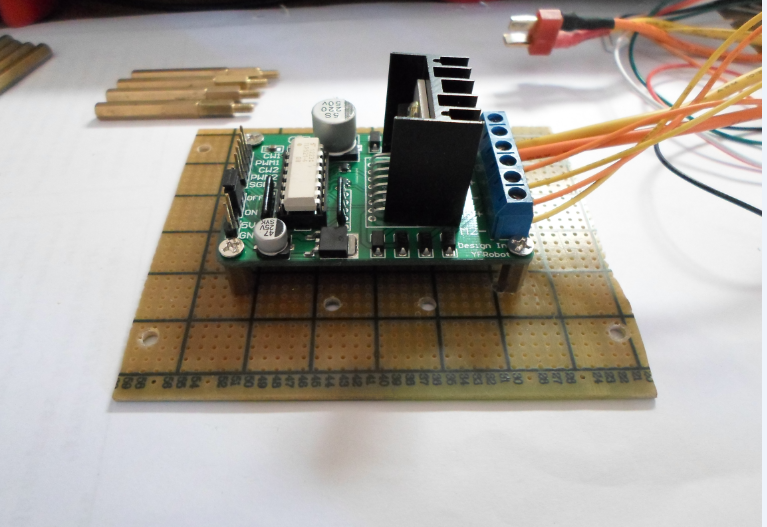
2> :L298N模块(淘宝上搜一大把)~~~

第二部分,小车的用来思考的大脑~~~
3> 主控:STC12C5A60S2 (看个人喜好,选一款自己用的比较熟悉的单片机都可以,比如AVR,STM32等等)
主控基本要求:PWM接口,最少2路(控制两个电机转速)
:定时器,最少2路(采集两个电机转速)
:I2C,最少1路(用来采集MPU6050的数据)
:UART,最少1路(用来下载程序,调试程序,还可以通过蓝牙将数据传到电脑或者手机上面进行分析,以后还可以通过蓝牙来控制小车~~)
:IO口若干~~至少6个吧(一般型号的单片机都够用了)
还有就是单片机速度要跑的快一些(晶振频率选大些~~)

第三部分,小车的感知~眼睛鼻子耳朵(其实应该是小脑吧,生物学的不好 >~< !!!)~~
4> 传感器:1> MPU6050(其实单轴陀螺仪(EN-03)和(MMA7260)加速度传感器也可以,不过这种都是模拟输出的,所以单片机还要带AD功能, MPU6050输出的是数字信号,而且集成了三轴加速度和三轴陀螺仪如果做小四轴或者飞控也可以用到它哦~~这样可以为后面做小四轴和飞控打下基础哦~~
2> 码盘:用来测量小车的速度(其实可以直接买带码盘的电机,用起来会简单些,如果喜欢折腾的,也可以自己买两个码盘装上)


第四部分(补充),差点忘了两个个很重要的东西~~~一个是小车的能源电池~~~关于电池选择:镍氢电池,航模上用锂电,18650锂电(四节以上串联),电压在7.4V到12V的可以,容量最好大点~~


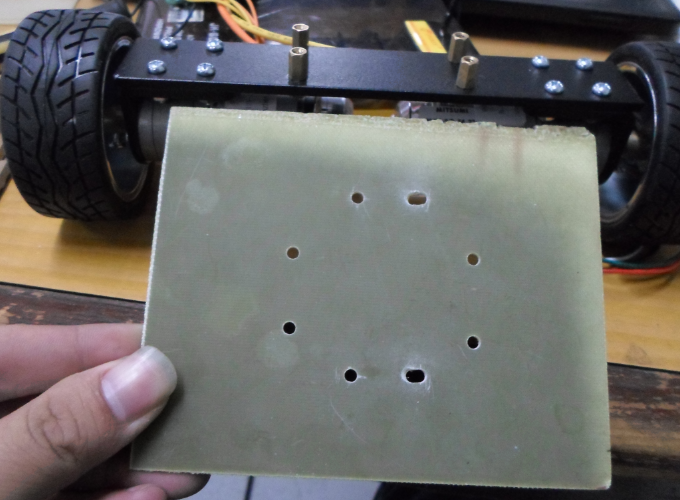
还有个一个就是汽车底盘,就将两个电机固定起来的东西~~~当然还有轮子~~


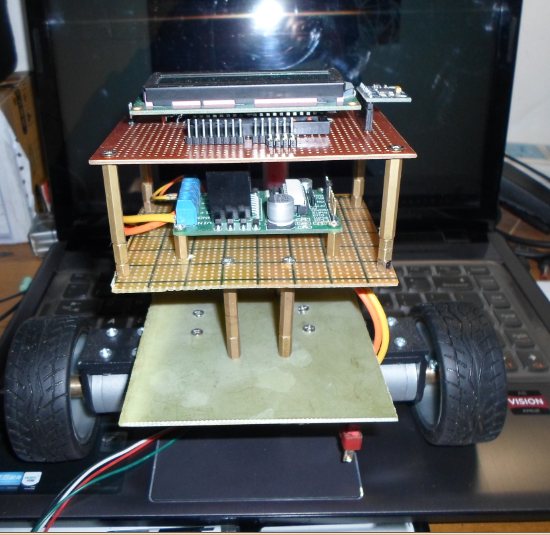
最后附上拼好底盘和底盘细节图~~~
OK差不多今天就这些了~~说的有点啰嗦了还望大家理解~~~后面一定改正这个毛病~ ~~
附上一些收集来的资料~~~
1. L298N
2 . MPU6050(英文和中文等等,这个芯片的中文的寄存器手册还真不好找~~)
3. 其他的资料可以直接百度得到~~~
2013.12.07
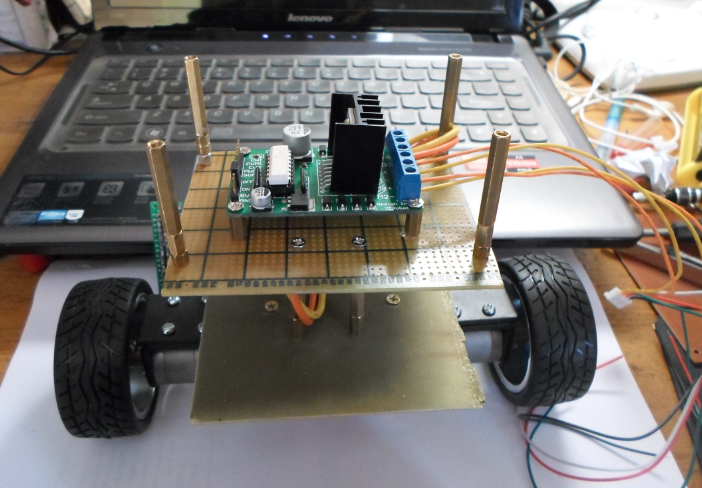
硬件基本搭建好了~~~~



































 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂