无线传感器网络中的DV—HOP定位改进算法

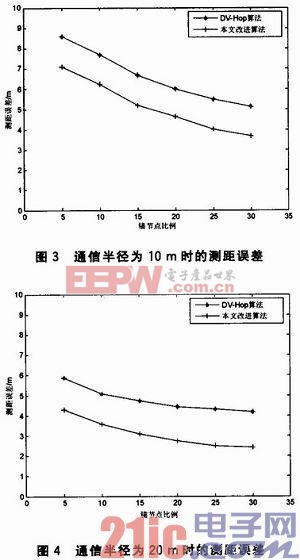
在同等条件下,改进的测距误差始终是低于原DV—Hop算法的,且不同的通信半径对测距误差也会产生不同的结果。图3中,通信半径为10 m,改进后的算法平均测距误差比原算法降低1.45 m;图4中,通信半径为20m,改进后的算法平均测距误差比原算法降低1.67 m。这是因为随着通信半径的变化,会对节点间的跳数和平均跳距产生影响。由于本文改进后的算法是用全网的平均跳距代替单个节点的平均跳距,这样使得对平均跳距的估计更为准确,估算距离也就越准确,越接近实际的距离。
3.2 定位误差
定位误差(Localization Error,LE)是指通过定位算法测量估计的坐标与实际坐标之间的差值,用这种差值除以节点的通信半径,就是定位误差率。计算方法如下:
![]()
其中,(x,y)为未知节点的实际坐标,(xi,yi)为定位算法所估计出来的坐标;R为节点的通信半径。
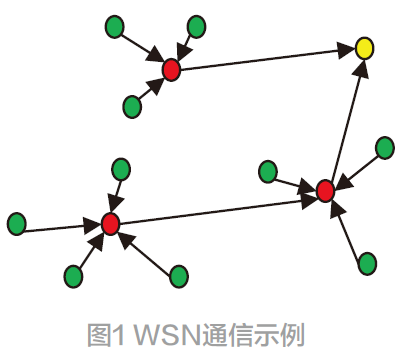
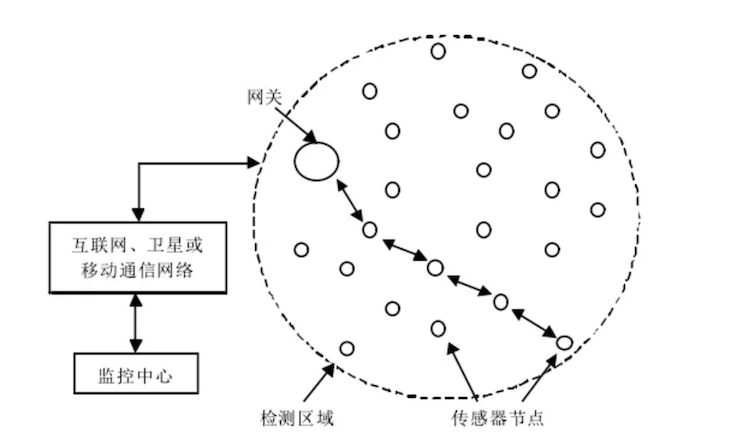
图5和图6是节点总数分别为100和300、节点通信半径为10 m时,本文改进算法、DV—Hop算法和参考文献中的算法三者在锚节点比例不同时的定位误差比较结果。从两幅图中可以看出,在相同的半径和锚节点的环境下,改进算法的定位误差率要低于DV—Hop算法和参考文献中的算法。但是在锚节点比例较低的情况下,节点的定位误差较大。这是因为锚节点较少时,未知节点与锚节点之间的距离变远,导致计算平均距离时会产生很大的误差。因此随着锚节点比例的增加,能够有效地减小定位误差。
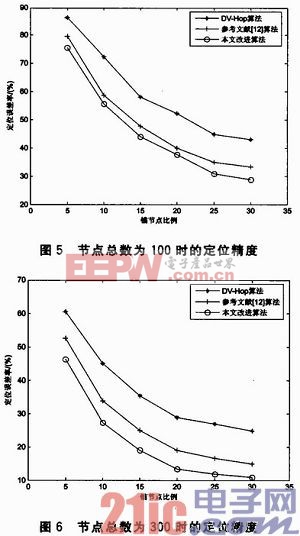
图5中,当锚节点的比例为30%时,DV—Hop的定位误差率为43.25%,参考文献算法的定位误差率为33.37%,而本文改进算法的定位误差率为28.34%。图6中,当锚节点的比例为30%时,DV—Hop的定位误差率为26.89%,参考文献算法的定位误差率为14.95%,而本文改进算法的定位误差率为10.21%。由此说明,本文的改进算法要优于其他两种算法。这是因为在参考文献中,只考虑了平均跳距一个因素对定位误差的影响,而本文改进算法则是从平均跳距的改进和利用连通度的不同选取锚节点两个方面考虑,使其定位误差进一步地减小。
结语
本文首先介绍了DV—Hop算法的基本思想,针对经典的DV—Hop算法中存在的定位精度不高的缺陷,提出了两点改进:
单个锚节点所估计的平均跳距来代替全网的平均跳距,会产生很大的误差,因此平均跳距利用全网平均跳距与单个锚节点估计的平均跳距的均值来修正;
根据连通度的不同选择最优的三个锚节点进行三边定位计算,以提高定位精度。
仿真实验数据表明,改进后的算法降低了测距误差,与参考文献等提出的算法比较,定位误差率进一步降低,从而提高定位精度。且在改进的过程中,没有添加硬件成本。







评论